

VERO er en firbenet robot, der effektivt fjerner et meget udbredt affald på strandene. Dens skabere forsikrer, at den også kan have mange andre anvendelsesmuligheder
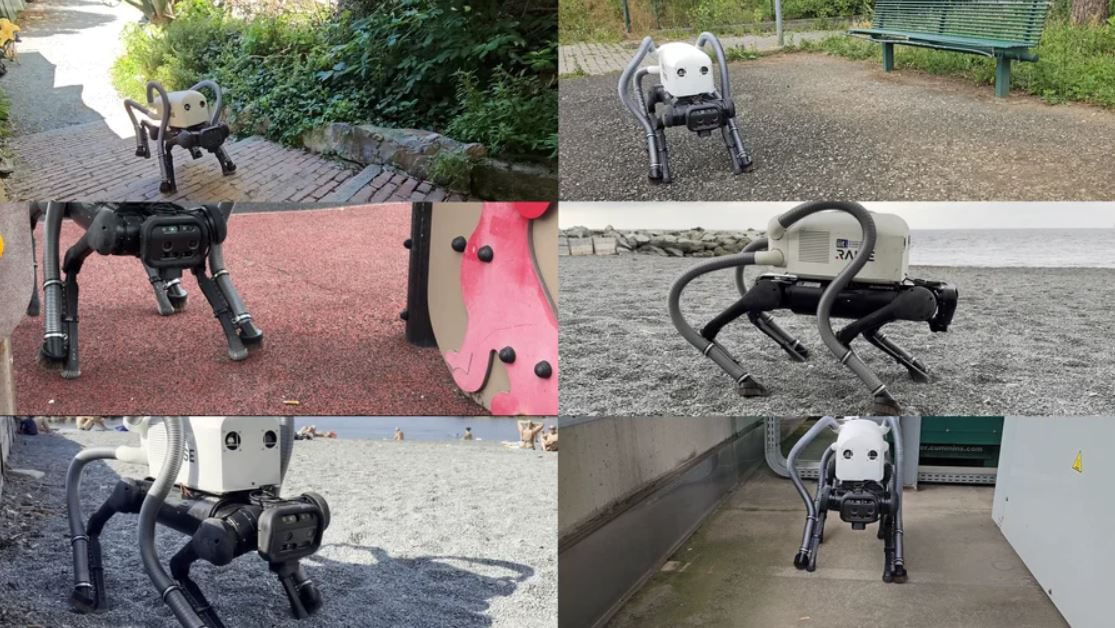
VERO er navnet på en ny firbenet robot, der er designet til at bekæmpe et af de mest udbredte og forurenende affaldsprodukter på verdens strande: cigaretskod. Denne enhed, der er udviklet af det italienske teknologiinstitut, er designet til at bevæge sig på ujævnt terræn som sand, mens den lokaliserer og opsuger cigaretskod uden at miste stabilitet eller effektivitet.
Dens struktur er baseret på en kommerciel robotplatform, som er udstyret med et opsugningssystem. Gennem rør, der er forbundet med dens ben, og med 3D-printede dyser er den i stand til at opsuge det mest almindelige affald i kystområder. Maskinen kan ikke kun gå, men også identificere affaldet, beregne en stabil position og udføre opsamlingen uden at afbryde sin bevægelse.
Som dens skabere forklarer i en artikel offentliggjort i tidsskriftet Journal of Field Robotics, bygger projektet på en grundlæggende idé: at forhindre, at dette affald ender i havet, da det frigiver mere end 700 giftige kemikalier. Cigaretskod er ikke kun skadelige for miljøet, men udgør også en visuel og sundhedsmæssig belastning i turistområder.
Takket være et computersynssystem og et integreret neuralt netværk kan robotten identificere cigaretskod i realtid. Genkendelsen foregår ved hjælp af kameraer, der er installeret på enhedens krop, og suppleres med et dybdekamera placeret under dens frontstruktur for at finjustere hver bevægelse inden opsamlingen.
Autonom detektion og opsamling
Processen er fuldstændig autonom. Operatøren definerer kun indsatsområdet, og robot-hunden planlægger en rute, der dækker hele området. Under de første tests lykkedes det enheden at samle op til 90 % af det opdagede affald, selv på ujævne overflader som trapper og blødt sand.
Forskerne bag VERO’s design forsikrer, at anvendelsesmulighederne kan udvides til andre sektorer. Blandt de mulige anvendelser er lokaliseret sprøjtning på marker, inspektion af revner i infrastrukturer eller placering af elementer under byggeriet.
Den mest innovative egenskab er evnen til at bruge benene samtidigt til at gå og udføre operative opgaver, hvilket gør den til en unik robot i sin kategori. Dette adskiller den fra andre systemer, der afbryder deres bevægelse for at betjene værktøjer eller håndtere genstande.






